Surgical Robot Transformer (SRT) 是一个通过模仿学习在达芬奇手术机器人(da Vinci)上执行外科操作任务的研究项目,开发出自动化的手术系统。该项目由约翰霍普金斯大学(JHU)和斯坦福大学(Stanford)的研究人员联合开发。
该项目解决了达芬奇手术机器人在运动学数据不准确导致的模仿学习失败的问题。通过引入了一种相对动作形式和手腕相机,机器人能够更稳定和准确地执行任务。从而让达芬奇手术机器人能够自动执行一些基本的手术任务,如组织提起、针头拾取与交接和打结。

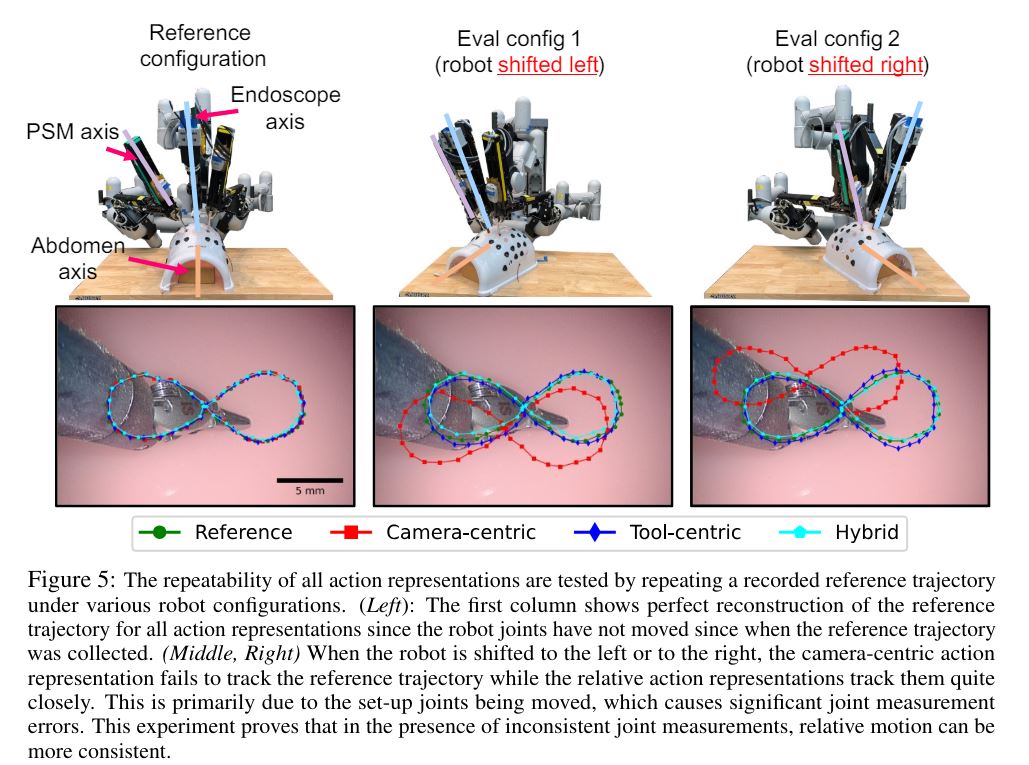
Surgical Robot Transformer (SRT) 是一个通过模仿学习在达芬奇手术机器人(da Vinci)上执行外科操作任务的研究项目,开发出自动化的手术系统。该项目由约翰霍普金斯大学(JHU)和斯坦福大学(Stanford)的研究人员联合开发。
该项目解决了达芬奇手术机器人在运动学数据不准确导致的模仿学习失败的问题。通过引入了一种相对动作形式和手腕相机,机器人能够更稳定和准确地执行任务。从而让达芬奇手术机器人能够自动执行一些基本的手术任务,如组织提起、针头拾取与交接和打结。










{kind=link}