
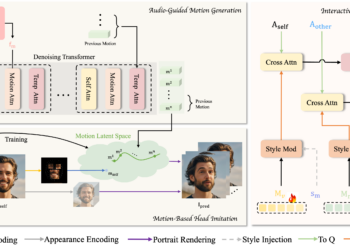
Clone Robotics是一家致力于开发低成本、生物仿生和智能仿生机器人的公司。其使命是利用先进的肌肉骨骼技术,制造能够执行日常生活中常见劳动的仿生机器人,类似西部世界里面那种仿生机器人。
- 2014年:创始人Łukasz Kozlik开始改进McKibben人造肌肉,并利用生物力学原理驱动自然人类骨骼,推动仿生机器人技术的发展。
- 2020年:Dhanush Radhakrishnan加入,帮助将肌肉骨骼技术产品化,并开发能够快速学习新操作技能的机器人“大脑”。
 核心产品
核心产品
- Clone Hand
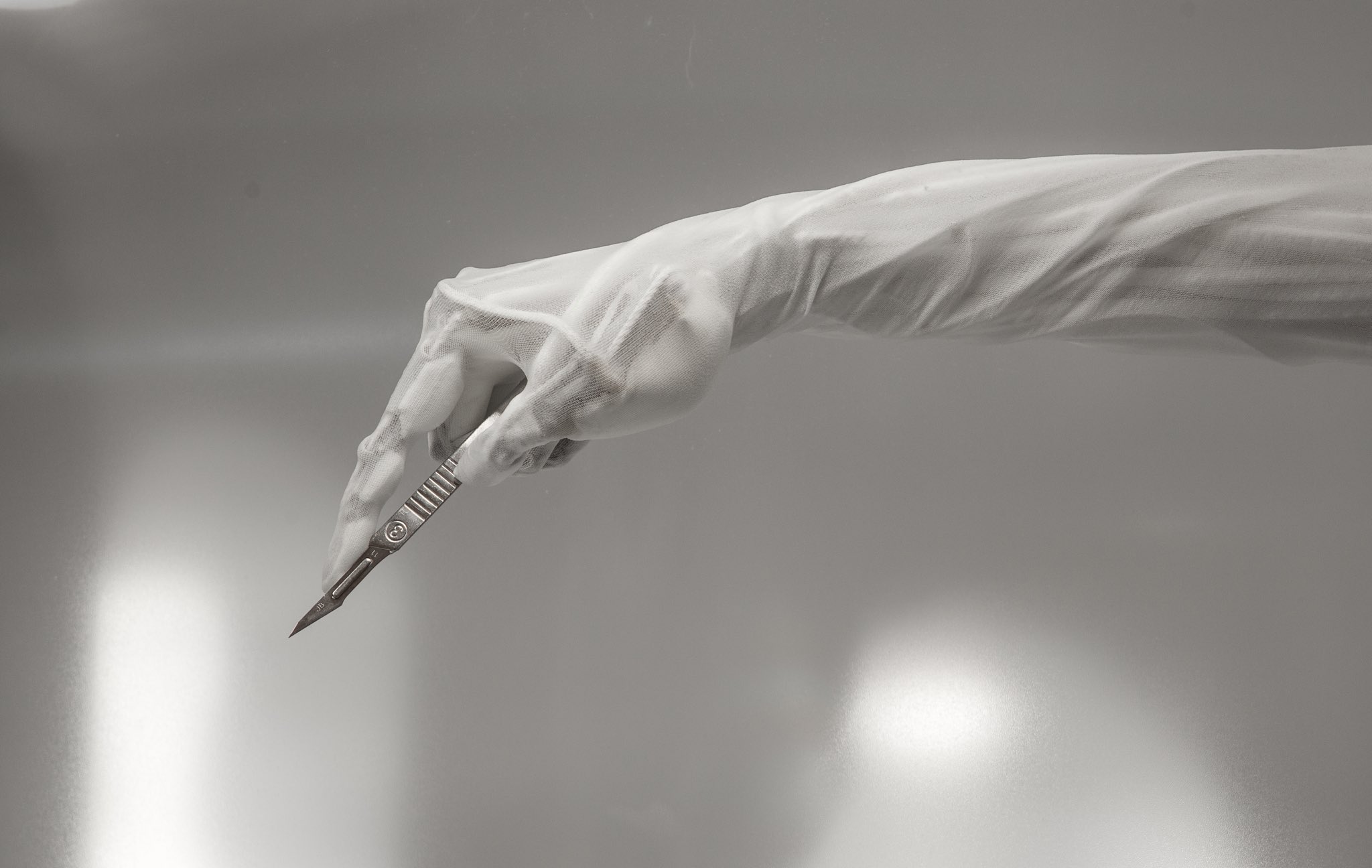
- Clone Hand 是世界上最接近人类肌肉骨骼结构的机器人手,使用Clone公司专有的液压肌肉和阀门进行驱动。其尺寸和生物特征与人类手相同,包括半条手臂骨、完整的前臂和手掌,并具备所有可能的自由度。
- 特点:高功率密度、生物仿生、拟人化的机器人手,具有24个自由度和37条McKibben肌肉,能够执行多种操作任务。
- 应用:适用于需要精细手部操作的场景。
- Clone Torso
- Clone Robotics利用其肌肉骨骼技术将拟人化手的设计扩展到整个类人躯干。Clone Torso具有坚固的脊柱、可动的颈部和从肩膀到指尖完全可动的双臂。
- 特点:拥有坚固的脊柱、可动的颈部和完全可动的双臂,设计与人类骨骼结构相似。
- 应用:用于需要复杂上半身运动的任务。
Clone Hand
Clone Hand是由Clone Robotics开发的一款高功率密度、生物仿生的拟人化机器人手。其设计和功能旨在模拟人类手的灵活性和操作能力,能够执行多种复杂的操作任务。

主要功能和特点
1. 高仿真度与多自由度
- 自由度:具有24个自由度,使其能够实现多种手部动作。
- 尺寸与生物特征:Clone Hand的尺寸和生物特征与人类手相同,包含半条手臂骨、完整的前臂和手掌。
2. McKibben肌肉
- 数量:37条McKibben肌肉,提供强大的驱动力。
- 性能:这些肌肉能够承受高负荷,具有较长的使用寿命和高效的收缩性能。
 3. 材料与制造
3. 材料与制造
- 聚合物:使用Clone开发的聚合物材料,这些材料比传统金属更柔软、更轻便、更便宜,且性能更佳。
- 整体式肌腱肌肉:采用整体式设计,提高了结构的稳定性和耐用性。
 4. 电液系统
4. 电液系统
- 电液阀门:每个手臂对应一个独立的电液阀门系统,能够实现精确的力和流量控制。
- 控制系统:内置电液阀门,具备本体感受压力反馈,提供高效的控制频率(100Hz)和通信频率(200Hz)。
5. 电池与动力
- 电池续航:2小时的电池续航时间,适合长时间操作任务。
- 动力系统:配备500W的无刷直流电机,提供强大的动力输出。
6. 灵活性与强度
- 操作负载:能够承受7公斤的操作负载,适用于各种需要强大操作能力的场景。
- 收缩比和收缩时间:肌肉纤维的收缩比为27%,收缩时间为0.3秒,确保快速响应和灵活操作。
应用场景
Clone Hand可以应用于以下场景:
- 工业制造:执行精细的组装和操作任务。
- 医疗康复:用于辅助康复训练,模拟人类手部动作。
- 服务机器人:在服务机器人中用于执行日常生活中的操作任务,如抓取物品、操作工具等。



 技术优势
技术优势
- 高效仿生设计:Clone Hand采用高效的生物仿生设计,能够模拟人类手的复杂操作。
- 耐用性和经济性:使用廉价且耐用的聚合物材料,降低了制造成本,同时提高了耐用性。
- 精确控制:电液系统和先进的控制算法确保了精确的操作和快速的响应。
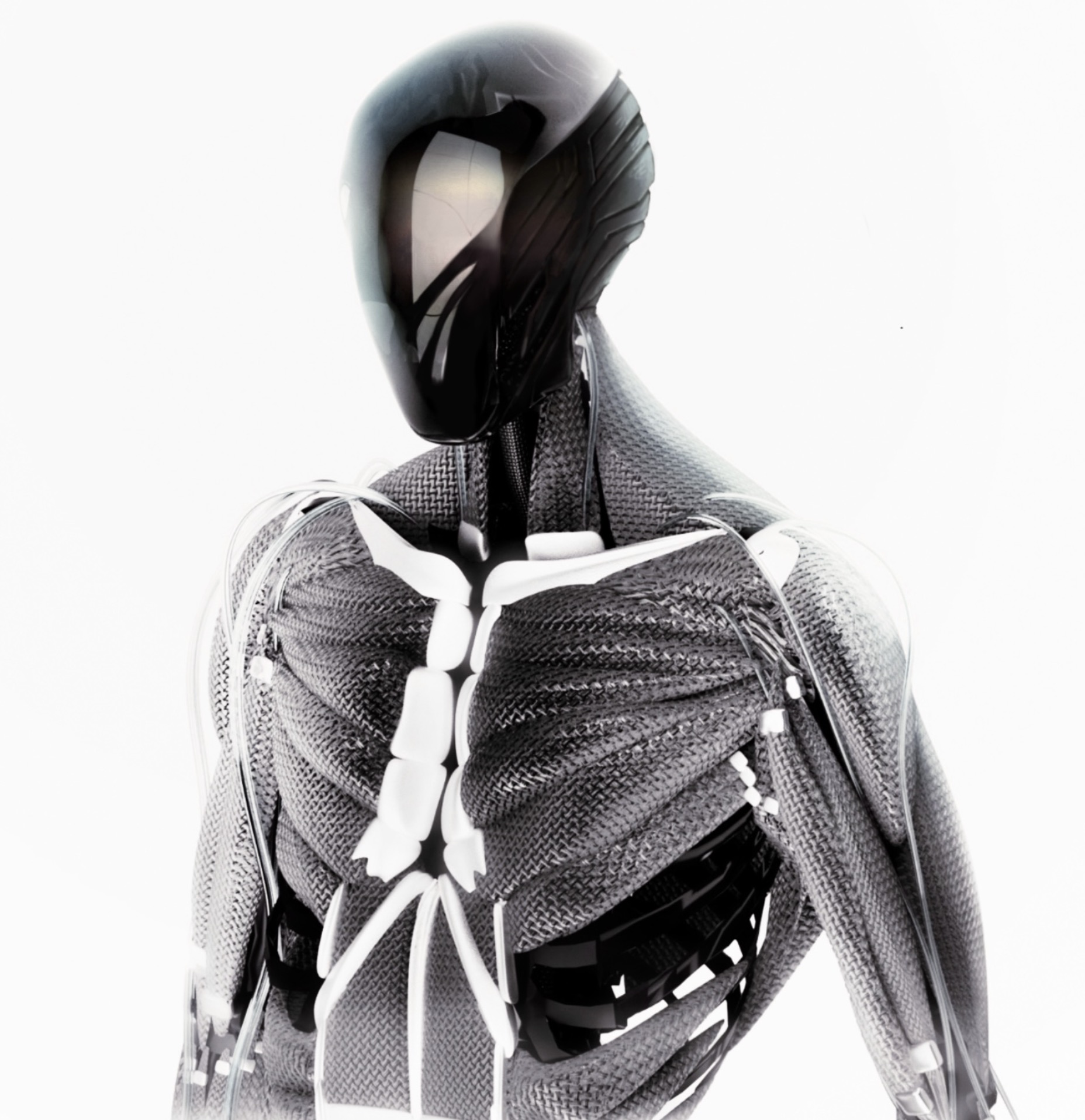
Clone Torso
Clone Torso是由Clone Robotics开发的一款高仿真、全功能的类人机器人躯干。它集成了坚固的脊柱、可动的颈部以及完全可动的双臂,旨在模拟人类上半身的复杂运动和操作能力。
 主要功能和特点
主要功能和特点
1. 高仿真度与结构设计
- 坚固的脊柱:提供了稳定的支撑结构,模仿人类脊柱的功能。
- 可动颈部:允许头部和颈部的灵活运动,增强了机器人的适应性和操作范围。
- 完全可动的双臂:从肩膀到指尖的每个关节都可以活动,使其能够执行多种复杂的操作任务。
2. 自然骨架设计
- 仿自然骨架:Clone Torso采用了与人类相似的骨架设计,内置Raspberry Pi 4B,用于高级控制和网络连接。
- 高级控制系统:通过Raspberry Pi 4B,实现对机器人的高级控制,支持网络连接和远程操作。
3. 电液系统与动力
- 电液无刷直流泵:功率为500W,为肌肉提供动力,能够模拟人类心脏的功能,为仿生肌肉提供必要的压力。
- 循环系统:包含单片式柔性水容器,储存2L的水,为电液系统提供动力源。
4. 组件与材料
- 单片式柔性水容器:设计紧凑,能够储存足够的水用于液压系统。
- 碳纤维骨骼:使用模制碳纤维骨骼,提供坚固且轻便的结构支持。
- 整体式肌腱肌肉:设计用于高强度和高精度操作。
5. 精确控制与反馈系统
- 电液阀门:每个手臂配有独立的电液阀门系统,能够实现精确的力和流量控制。
- 本体感受压力反馈:提供实时的压力反馈,确保操作的准确性和灵活性。
6. 电池与续航
- 电池系统:在腹部空间放置电池,提供足够的电力支持长时间操作。
- 压力调整电机控制器:确保液压系统在操作过程中保持稳定的压力。
应用场景
Clone Torso可以应用于以下场景:
- 工业自动化:用于复杂的装配线和生产任务,替代人工进行高精度操作。
- 医疗辅助:在医疗领域用于康复训练和辅助操作,帮助患者恢复上肢功能。
- 服务机器人:在服务行业中用于执行日常操作任务,如搬运物品、辅助生活等。
技术优势
- 高仿真设计:Clone Torso采用高仿真的骨骼和肌肉设计,能够模拟人类上半身的复杂运动。
- 先进的电液系统:高效的电液无刷直流泵和独特的电液阀门设计,确保了机器人的高精度操作。
- 灵活控制:内置的Raspberry Pi 4B和本体感受压力反馈系统,使其具备灵活且精确的控制能力。











{kind=link}